



About TEC mapping
The ionosphere is a significant source of error in satellite navigation systems, such as GPS. In ordinary operation the position of a GPS receiver is estimated by measuring the time delay between a radio signal transmitted from each satellite and the reception of that signal at the receiver. Assuming a constant speed of light, this time delay can be converted to a receiver-satellite distance. By comparing the distance to multiple satellites a GPS receiver can determine its three dimensional position.
The ionosphere disrupts this approach since the GPS radio signal is slowed by the presence of free electrons, causing an additional time delay and hence an error in the distance to each satellite. The greater the total number of electrons (Total Electron Count, or TEC) on the signal path, the greater the time delay. The GPS system broadcasts on two frequencies and since the ionosphere is a dispersive medium the time delay on each signal, for a given TEC, will depend on the frequency of that signal. This allows the TEC to be measured by examining the differential time delay between the two frequencies.
Once the GPS receiver data has been processed into line of site TEC measurements for all receiver and satellite pairs, this data needs to be combined into a regional map of TEC. To do this, an important simplifying assumption is made. If we consider the typical idealised vertical electron density of the ionosphere, shown in Figure 1 below, we see that the vast majority of the electrons reside in the 'F2' layer. This allows us to assume that all electrons along the receiver to satellite path reside at a single altitude, without a significant loss of accuracy. This turns the mapping challenge from three dimensions into two, since we now only need to specify how the electron density of this model 'thin shell' ionosphere varies with latitude and longitude.
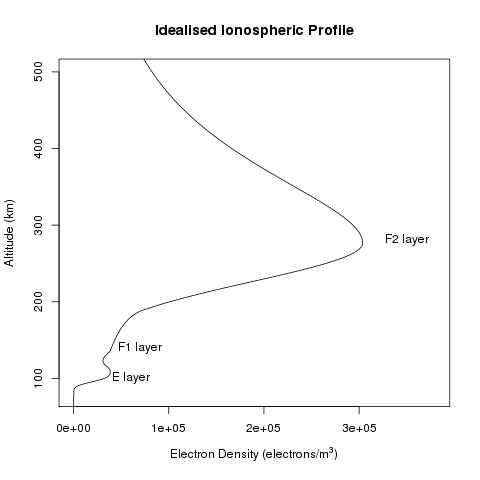
Figure 1: Typically most ionospheric electrons reside near the peak of the F2 layer.
In addition to the GPS derived TEC data, the real time map is also fed information from the IRI-2007 ionospheric model, driven using critical frequency (foF2) measurements from the SWS regional ionosonde network. The GPS data is more accurate for specifying TEC than this model, however the GPS coverage is poor in some parts of the Australiasian region under consideration (particularly over oceans) so the IRI model is used only where GPS TEC data is unavailable.
We construct the TEC map using a set of Spherical Cap Harmonic (SCH) basis functions. These are related to spherical harmonics, but defined over a region rather than the entire globe. We use a Kalman Filter to find the optimal set of co-efficients given the GPS TEC and IRI model data.
The GPS TEC data are obtained from a number of sources including SWSnet, Geoscience Australian, LINZ and SunPoz instruments, as well as some regional IGS sites. Data is obtained every 15 minutes.
The resulting map can be used to correct for the effects of the ionosphere in real time for improved GPS positioning. The results can also be used for post processing of data. If you are interested in this service please contact ASWFC.
